Exploring compact, efficient and powerful nano-type servo drives with innovative thermal management technology and EtherCAT and CANopen support.
By Dean Crumlish, Product and Applications Manager, Copley Controls
To meet the needs of today’s advanced motion control applications, servo drives are getting smaller. However, the power requirements are far from following suit. These applications require powerful, embedded drives that must function in constrained spaces in order to meet the ever-shrinking size requirements of modern machines. To this end, many miniature servo drives can be mounted onto the motor itself or within robotic joints.
Compact, powerful and embedded servo drives play a particularly important role when it comes to robots, which are increasingly taking center stage across many industries. In healthcare settings, they enable new, state-of-the-art surgical and diagnostic practices. They also play an important role in the semiconductor manufacturing sector for their ability to handle small, delicate parts and complex assemblies with high levels of precision and cleanliness. And in the world of logistics, mobile robots can navigate warehouses and distribution centers autonomously, streamlining operations and accelerating order fulfillment.
Other important industries for embedded servo drives include aerospace, lab automation and biomedical equipment, which often involve automated guided vehicles (AGV), autonomous mobile robots (AMR) and other complex systems that must handle and transport objects, navigate the environment and accomplish various tasks.
Yet for all the innovations happening in the world of automation, the compact servo drives behind these sophisticated systems must be able to meet a combination of requirements related to motion control, size and power, including:
- Providing high positional accuracy and repeatability.
- Achieving excellent dynamic performance, including smooth motion profiles, fast response times and precise speed and torque control.
- Supporting real-time communication protocols, such as EtherCAT, to ensure reliable communication between the drives and control system.
- Featuring a compact size for mounting onto the motor itself or within the robotic joint.
- Packing enough power, despite their small size, to move the robotic arm, AGV or AMR with the utmost reliability and efficiency.
Meeting all these requirements is easier said than done, however. Designing powerful, miniaturized servo drives that can perform within the tight confines of robotic joints, AGV chassis and other embedded motion control applications presents a number of design challenges — not the least of which is thermal management.
How To Stay Cool
As servo drives shrink in size, the surface area available for heat dissipation shrinks as well, making thermal management progressively more challenging. Fortunately, there are a number of design principles that together can maximize the efficiency of even the smallest embedded drives. Our Nano embedded servo drives (see sidebar) exemplify these principles to deliver industry-leading power density and efficiency (>99%), which helps with managing heat and electromagnetic interference (EMI), as well as supporting size reduction.
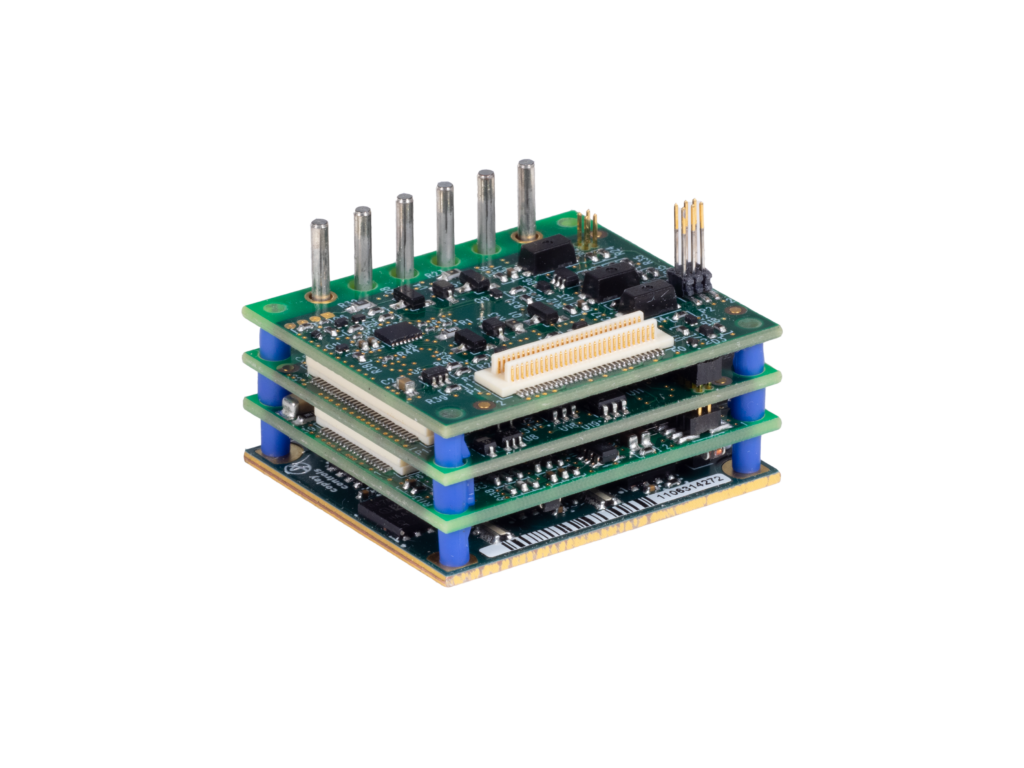
Circuit materials. The first and most obvious heat dissipation solution involves an upgrade to the drive’s circuit board materials. The Nano drive, which consists of a four-board PCB stack, uses a single-sided board with a copper-alloy substrate (TClad). This board, which handles power for the device, would traditionally have had an aluminum substrate, but the switch to the proprietary TClad copper alloy resulted in a threefold improvement in thermal conductivity.
Custom components. Another solution involves the use of custom-designed components to increase heat dissipation capabilities. For example, the Nano features custom-designed pins to carry current out of the drive. Not only are the custom pins smaller than a standard connector, but they are also designed to conduct heat away from the drive.
Dynamic gate drive tuning. The output stage consists of two key components — the gate drive integrated circuit (IC) and metal-oxide-semiconductor field-effect transistor (MOSFET) — both of which tend to be standard, off-the-shelf components that are used by all key players in the motor drive world. To maximize the Nano’s thermal management capabilities, we make critical design decisions during their selection process:
- The gate driver IC. We select compact, half-bridge drivers with high output current capabilities. Because the output current limits the size of the usable output stage MOSFET, it is important that we select drivers with high-current capabilities.
- The output stage MOSFET. These components must feature a small package, low thermal resistance, high current and low drain-source on resistance (RDS(on)).
In terms of thermal management, the magic happens in between these two components. Dynamic gate drive tuning controls the timing between the power device turn-on and turn-off to achieve low power dissipation while meeting electromagnetic compatibility (EMC) requirements.
Current sensing. To further reduce heat dissipation, the Nano features some clever methods for measuring current. This novel approach to current sensing uses ultra-low-resistance current sense resistors, enabling precise current sensing with minimal power dissipation.
Finally, the smallest, most powerful servo drives also need to apply a variety of other strategies to minimize heat buildup. In the case of the Nano, these include the overall construction and layout of power components on the board, We can also pull a number of levers within the drive’s firmware to further reduce dissipation, if required. For example, one feature — called bus clamping — effectively reduces switching losses by as much as 33%.
At the end of the day, managing the heat on the smallest, most powerful drives does not come down to a single design principle. Instead, it’s the sum of many small, carefully considered design decisions.
The Nano Series of Digital Servo Drives
An example of a servo drive that incorporates the right power density and thermal management features is the Nano Series. Each compact unit integrates easily into AGVs, AMRs, robotic joints and other automated equipment. Designed for space-limited applications that need precise speed and position control, the Nano Series represents the next generation of motion control technology, enabling users to achieve unparalleled accuracy and efficiency in their applications.
The Nano Series comes in a small footprint of 35 by 30 by 23.4 millimeters, operates from 9 to 180V DC input voltage and delivers up to 35A of continuous current and 70A peak current to provide exceptional power density and efficiency. Its compact size also gives integrators the flexibility to mount units directly onto the motor or within robot joints. The optional connectorized PCB and CME commissioning software facilitates setup and tuning.
Additional features and specifications include:
- Safe Torque Off (STO) capability with Sil 3, Category 3, PLe conformance
- Six digital inputs and four digital outputs
- Four voltage and current combinations
- One ±10-volt (V) 12-bit analog input
- BiSS-C unidirectional and SSI absolute encoders (primary)
- Digital incremental encoder (primary and secondary)
- Frequency analysis tools
- Dual encoder feedback support
- 32-bit floating point filters and multiple advanced filters
In addition, the Nano Series supports EtherCAT or CANopen communication protocols, enabling real-time data exchange. Nano Module EtherCAT NES and Nano Module CANopen NPS models are available with an EZ Board option to simplify mounting.
Best-in-class Power Dissipation
The following graphs display the power dissipation in our NES-090-70 and NES-18-10 Nano drives when the pulse-width modulation (PWM) outputs are driving the motor. Adding the PWM dissipation to the Vlogic dissipation yields the total dissipation in watts for the drive.
For the NES-090-70, the dotted lines show a dissipation of 18 watts (W) at a continuous current of 28 Adc and +HV = 85 Vdc. For theNES-18-10, the dotted lines show a dissipation of 5.2 W at a continuous current of 4.4 Adc and +HV = 180 Vdc.
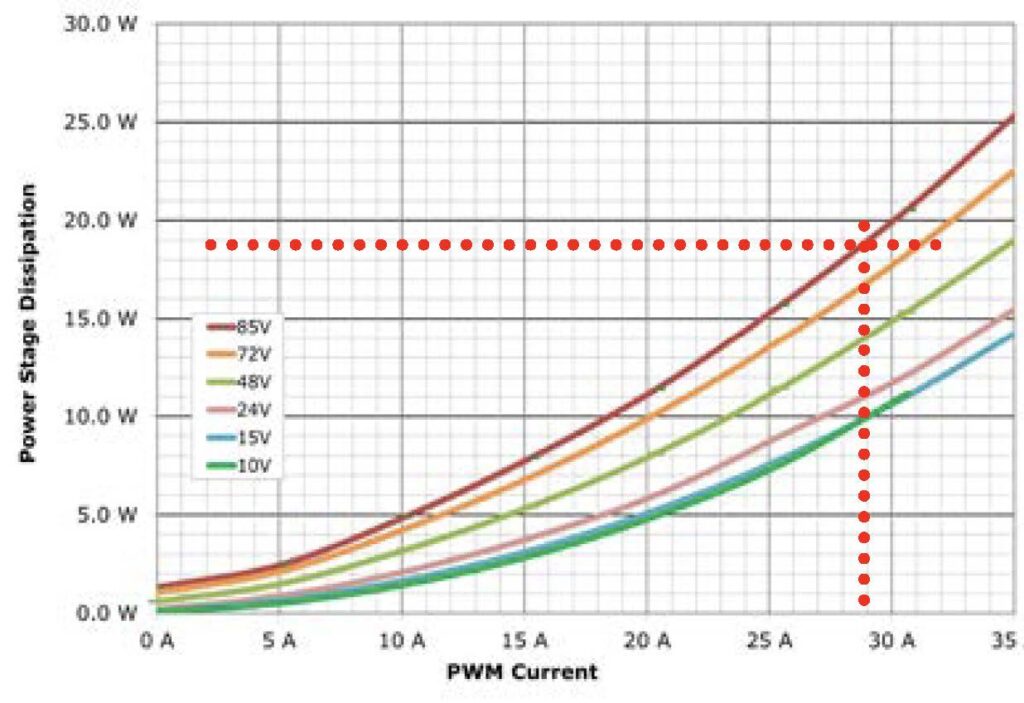
Caption: PWM output dissipation for the NES-090-70.
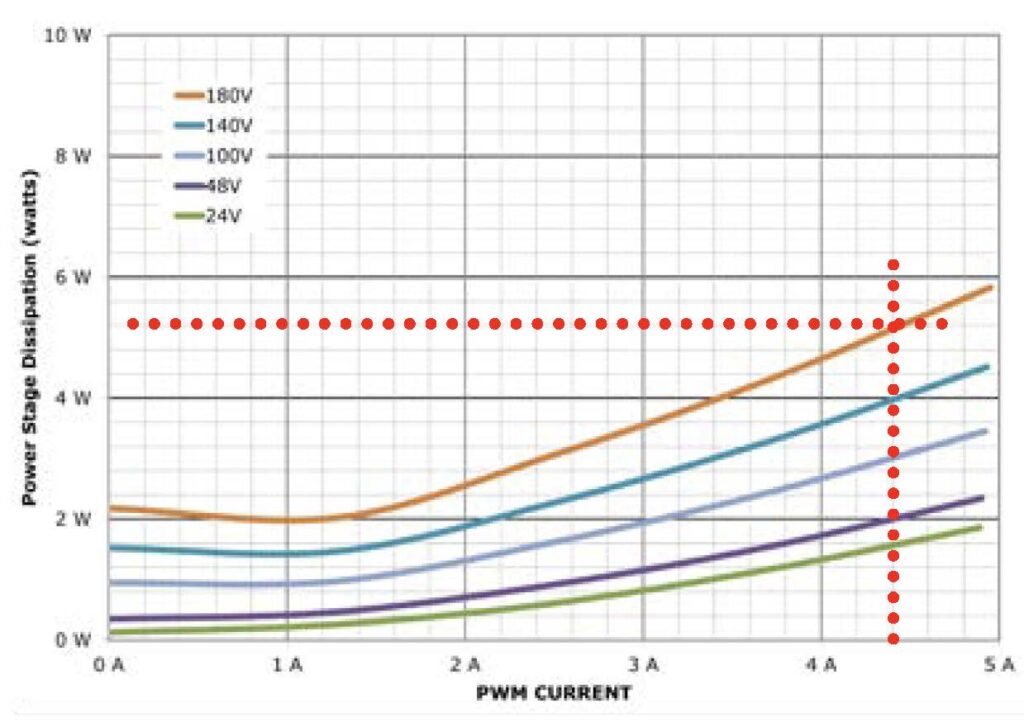
Caption: PWM output dissipation for the NES-18-10.
Relevant for all NES models, this final graph shows the power dissipation in the Vlogic circuits that power the drive’s control circuits and external encoders. Adding the PWM dissipation to the Vlogic dissipation yields the total dissipation in watts for the drive. The dotted lines in the chart show a dissipation of 3.0 W at Vlogic = 30 Vdc when the drive is in an enabled state and outputting 250 mA for an encoder.
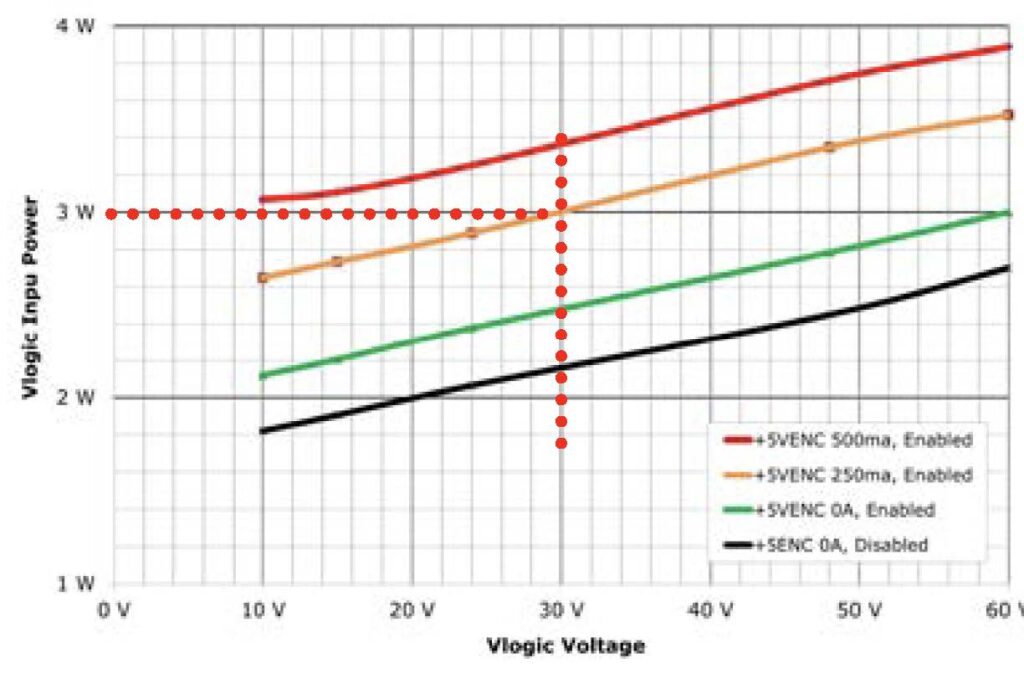
Caption: Vlogic and encode +5V output dissipation for all NES models.
*Note: Charts taken from: https://copleycontrols.com/wp-content/uploads/2021/11/NES-ds-2.pdf