A helical gear is an ideal motion solution for various medical applications thanks to a design that achieves gradual teeth meshing across a large surface area, optimising quiet operation for patient comfort. A significant contributor to this advantage is the consistent transmission of forces between the gear teeth, minimising the crucial factor of mesh stiffness deviation. Research and development shows that customisation of design areas such as tooth geometry can further reduce audible noise.
Portescap’s Vivek Salve, Deputy Manager Design and Development, and Rushikesh Gaikwad, Senior Engineer, explain why helical gears ensure quiet operation.
In hospital settings, as well as other locations where patients are under care and treatment, a quiet environment is crucial for their rest, recovery and comfort. This means that devices powered by electric motors, such as medical infusion pumps, ventilators, or even surgical robots, need to operate quietly as well.

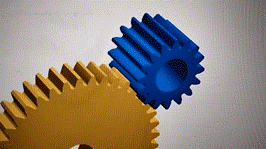
The design of a helical gear ensures that the meshing teeth pair come into contact gradually and engage along a helical path.
Gears are commonly used in combination with electric motors to enable a higher torque to be delivered, as well as to match the motor’s output with the load. A gear might also be integrated to reduce motor speed, and while this can be necessary for drive requirements, it can also help to reduce audible noise.
Gear design itself plays a significant role in noise management. Two common designs are spur and helical gears. Spur gears have straight teeth, mounted parallel to the gear’s axis. This is the simplest and most cost-efficient design, so spur gears are common to many applications. In contrast, helical gears feature teeth positioned at an angle to the axis, and it’s this helix formation that gives the gear its name. This design is more complex, but it enables gradual meshing of the teeth. The advantage is a reduction in impact, vibration and, crucially for these purposes, audible noise.
Gear operation
Theoretically, the smooth and continuous integration of gear teeth can transmit uninterrupted power. To optimise this potential, a new pair of teeth must come into contact before the preceding pair leave contact. In the case of spur gears, this contact takes place simultaneously over the entire face width of the teeth, positioned in parallel to the gear’s axis. As a result, an abrupt change in stiffness occurs at the transition point when the contact of the preceding teeth in mesh is over, and the new tooth pair comes into mesh.
Instead, the design of a helical gear ensures that the meshing teeth pair come into contact gradually and engage along a helical path. This means that contact commences at one end of the gear and moves across the face width as the gears rotate. In simple terms, this design means that helical gears have both smoother and longer contact of teeth in mesh than spur gears. This contributes to a lower transmission error, which is defined as the difference between the optimum position of the perfect output gear and the actual position of the gear. A lower variation in the speed and force of gear teeth pair engagement creates a smoother drive. Consequently, this helps the helical gear achieve quieter operation.
Spur gears contact takes place simultaneously over the entire face width of the teeth, positioned in parallel to the gear’s axis.
Difference in mesh stiffness
Meshing stiffness deviation is a significant factor in transmission error and therefore gear noise. Meshing stiffness is the ability of the gear teeth to resist deformation under load. The lower the deviation level between the teeth, the lower the noise. This is another area where the helical gear has an advantage. In addition, the helical gear also features an increased overlap ratio. This represents the extent of engagement between the teeth of two gears during operation. The greater the overlap, the higher the contact ratio, and as a result, the lower the deviation in meshing stiffness.
Returning to a helical gear’s design, it achieves gradual engagement of its teeth and also makes contact over a larger surface, which increases the contact duration. These factors combine to achieve a higher overlap ratio, but they also mean that the load is distributed more evenly across multiple gear teeth at any given moment, minimising the deviation in mesh stiffness.
To further enhance these advantages, helical gear teeth can be specifically designed. The Romax system level simulation supports in selecting the best helix angle to minimize the gearing Noise. Romax simulation followed by Noise measurement in an anechoic chamber validates the reduction in gearbox noise.
Customisation to minimise noise levels
A helical gear is an ideal choice to minimise noise in applications such as medical devices. Specific considerations on aspects such as the shape of the tooth, its geometry, as well as production materials and technology, can help to achieve significant enhancements to the smooth running of the transmission. While off-the-shelf helical gear designs may already fit the requirement, the chosen motion designer should also be able to customise the solution to achieve exacting needs.
Dependent on the specific noise level requirements of the application, Portescap’s engineers regularly integrate with OEMs and contract engineering teams to optimise motion solution designs in accordance with specific noise level requirements. In these cases, the basis of the helical gear design is often a fundamental starting point in achieving the optimum solution.
For more information, visit www.portescap.com






