Robotics has the potential to provide therapy to people with neurological disorders, assisting clinicians and potentially improving the care outcome. Human Robotix, a start-up formed by a team of academic researchers, has developed a robot that can provide assessment and therapy of the wrist, elbow, and ankle. Early results suggest a positive response for people with conditions such as stroke and cerebral palsy. To provide the robot’s drive system, Human Robotix has partnered with maxon.
maxon – Human Robotix
Neurological disorders affect the brain, spinal cord, and nerves throughout the body, and in severe cases, they can impact specific muscle movement. This makes it harder for people to perform tasks ranging from handwriting or holding a knife and fork, to walking.
Therapy can be vital to help people with these conditions improve their motor skills, and research in robotics is ongoing to support and enhance treatment. Not only could robotic techniques potentially supplement or enhance traditional therapy practices, but by reducing the demand on therapy services, the technology could also help to reduce patient waiting times.
Robot-assisted therapy for neurological disorders involves the patient touching and manipulating a physical control interface in response to robotic feedback, in a process called haptic interaction.
Dr. Aaron Yurkewich, Assistant Professor, Ontario Tech University, explains: “A robot provides a specific, measured force that the patient resists, or alternatively, that assists the patient. Through these exercises, the goal is for the patient to adapt over time, so when you take the force away, you can measure how the person responds under normal conditions.”

Investigating human neuromechanics and robotic rehabilitation
Research into the value of robotic interaction for patient assessment and therapy is ongoing, with positive results emerging. To consolidate and progress the study, Aaron, and his colleagues lldar Farkhatdinov, Kings College London, as well as Joshua Brown and Etienne Burdet, both of Imperial College London, have formed the start-up business, Human Robotix.
The team has developed a new robotic interface to study the human neuromuscular system and treat the effects of stroke, the most common neurological disorder for adults. The modular robot also enables researchers to investigate how the technology can assess and provide therapy for people with cerebral palsy, the most prevalent neurological condition in children.
Developing a system that could be available to practitioners and patients, the robot has to be compact and portable, allowing it to be used in the research lab, clinic, or home. To fit these needs, the Human Robotix team has developed the HRX-1.
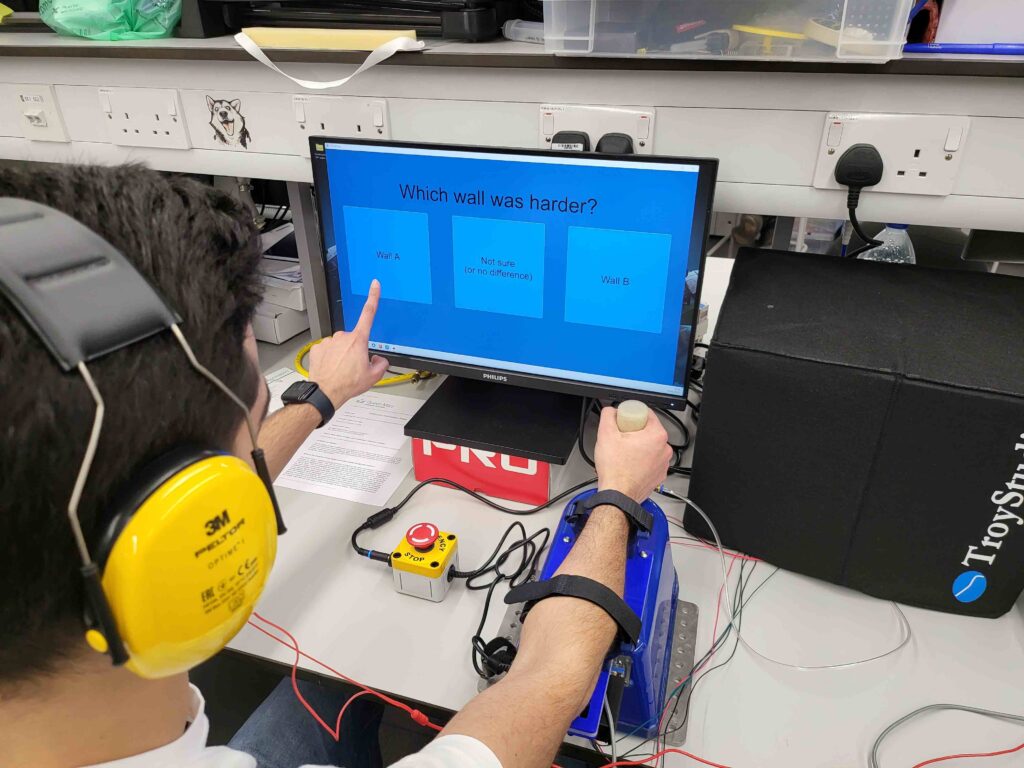
The neuromechanics robot is based around a hand- or foot-controlled grip that the patient moves, with the aim of tracking a target displayed on a screen. Resistance or assistance in tracking the target is provided by the robot, which can be controlled by the therapist or researcher. The grip can also move freely, with no additional forces, to replicate normal, real-world conditions. The robot is modular and reconfigurable for wrist, elbow, and ankle, as well as bi-manual operation settings involving both upper and lower limbs.
Feedback achieves the right assistance-resistance balance
The system also pairs with an electromyography (EMG) unit to measure muscle effort, and an electroencephalography (EEG) device that measures brain activity. Depending on this feedback, the assistance or resistance that the robot provides can be varied accordingly.
“When you add robotic assistance to rehabilitation, you want it to be an encouraging force, but you don’t want it to make all the effort for you because the patient isn’t going to get the benefit,” says Aaron. “With feedback, we can control the robot to provide the right balance of assistance, until eventually, the robot can then provide the right level of resistance to encourage patient adaptations.”
The motor is central to the assistance and resistance that the robot can provide. Up to 4Nm pulse torque is required to test a patient’s maximum strength, and precise control is also essential to achieve fine adjustment to torque and position.
Young Engineers Program
With support from maxon’s Young Engineers Program that supports projects from universities and start-ups around the world, Human Robotix specified maxon’s EC90 brushless DC motor, combined with a maxon EPOS4 position controller. This drive system provides torque resolution to 0.014Nm and position sensing down to just 0.01°.
The motor also needed back drive operation to allow patients free control with no assistive or resistive force, essential to establish a benchmark of regular condition operation.
For the robot to operate as a tabletop system, low motor height is also crucial.
“Most tables aren’t adjustable, and to use the robot, the patient’s arms have to be positioned at a certain level, so another key reason we chose maxon’s EC90 flat motor was to minimise height, thanks to its compact, flat design,” says Aaron.
To use the robot with a patient, the HRX-1 has three different levels of control, based on the set-up time and programming expertise of each user, who could range from a physiotherapy clinician, to an engineering researcher.
Time-pressed clinicians, for example, can use the robot’s three-button control pad to select assistance, resistance, or no resistance modes. Alternatively, to refine control to the most precise level, the robot integrates with the MATLAB Simulink graphical programming environment.
“With the MATLAB Simulink level of control, the user can include algorithms for various stages of the exercises, commanding when, and how much, assistance or resistance will be provided,” says Aaron. “We also have students working on AI, investigating the potential of taking signals from the brain, muscles, or directly from the motor encoder, to adapt the assistance or resistance while the exercises are taking place.”
Increasing the volume and quality of care
The robot is undergoing medical trials with settings such as Schön Klinik Bad Aibling, Germany, Evelina London, part of Guy’s and St. Thomas’ NHS Trust, and other institutions worldwide. Research includes using two systems at once to simulate bi-manual activities such as opening a jar, combined robotic and functional electrical stimulation therapy.
“Working on this project is so fulfilling because you can see the benefit, both to the patient and the clinician,” says Aaron. “Often, the clinician is struggling to provide as much therapy as they would like to, to keep up with demand, while for the patient, they might only be able to receive rehab when they’re with the therapist. With our robot, the HRX-1 has the potential to increase both the volume and quality of care.”